梯形控制是无刷直流(以下简称“BLDC”)电机最简单的控制方法之一,它施加方波电流,使电机相位与BLDC电机的梯形反电动势波形对齐,以获得最佳转矩。BLDC 的梯形控制适用于白家电、制冷压缩机、暖通空调(HVAC)鼓风机、冷凝器、工业驱动、泵和机器人等多种应用电机控制系统设计。
构成驱动电机的三相逆变器的MOSFET具有六种开/关状态组合,从而在转子磁场的旋转平面内产生六种可能的定子磁场方向。因此,该方法也称为六步法或120°块换向。根据电机的所需旋转方向,六种可能的逆变器状态必须遵循特定的顺序,以便定子和转子磁场方向布置产生最大转矩。转子位置反馈通常通过安装在电机上的霍尔传感器(有传感器)或通过在旋转时(无传感器)感测电机相位的反电动势来实现,从而确定适当的换向时序。
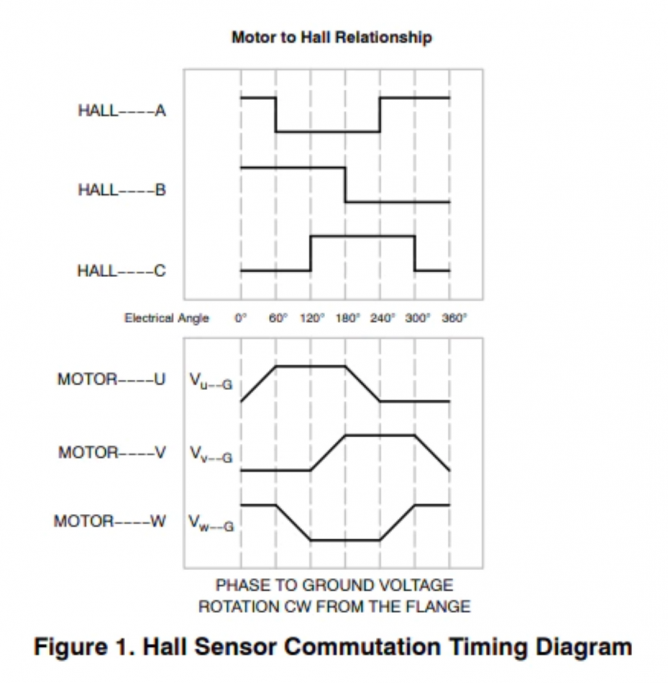
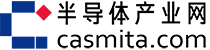
图1:霍尔传感器换向时序图
有传感器式梯形控制不需要任何电压或电流反馈信号即可运行。它使用来自霍尔传感器的位置反馈来确定为电机各相位通电的正确顺序。安装在电机上的霍尔传感器通过转子永磁体旋转磁场产生的霍尔效应来感测转子位置。即使在启动时,也可以进行适当的换向,因为即使在零速下,转子位置信息也存在。
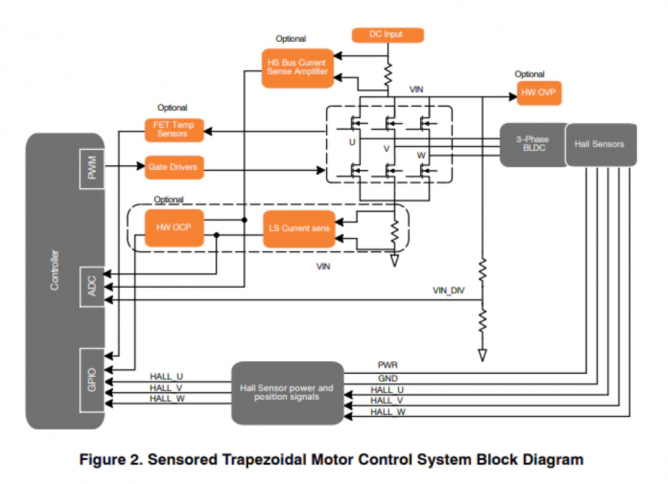
图2:有传感器式电机梯形控制系统框图
无传感器的梯形控制使用电机旋转产生的反电动势来确定适当的电机换向顺序。对于梯形控制,一次只能通电两个电机相位。由于非通电相位中没有电流流动,因此此时可以直接感测反电动势。在非通电阶段,反电动势呈线性增加或减少。大多数用于梯形控制的反电动势位置反馈技术都依赖于涉及反电动势过零检测(ZCD)的方法。监测反电动势,以确定它何时越过参考点——电机中性电压或直流总线电压的一半。
图3:无传感器的电机梯形控制系统框图
虽然有传感器的梯形控制更容易实施,但由于在电机中安装了霍尔传感器,需要增加成本,还需要从电机进行更多布线,这在某些环境中不太可行。无传感器控制更为复杂,必须针对特定负载或工作条件进行调整,且在重载下可能难以启动。不过,无传感器控制非常适合已知负载曲线或负载随速度增加的应用如风扇。
其他设计注意事项
在为您的应用考虑BLDC电机控制设计时,您还需要考虑一些关键设计因素,包括:
◆ 过流保护(以下简称“OCP”)——硬件、软件或两者都可实现OCP,以限制电流和缓解硬故障。
◆过压保护(OVP)——硬件、软件或两者均可保护电机免受破坏性电压的影响。
◆过温保护(OTP)——监测逆变器中的MOSFET工作温度非常重要,尤其是在温度范围较宽的环境中。
◆MOSFET选择—安森美(onsemi)全面的高能效屏蔽栅沟槽型MOSFET产品组合可根据您的特定设计要求进行定制,以实现电机控制系统的卓越性能。
高度集成的电机控制方案可实现节能。梯形BLDC控制的优点包括控制算法简单、效率高,电机简单,可实现长的使用寿命和更低的运营成本。梯形控制与基本保护和设计技术相结合,提高电机的控制和精度,是驱动电动工具和机器人电机的最高效方法之一。
(来源:安森美)

