随着自动驾驶的发展,调频连续波激光雷达(FMCW LiDAR)受到越来越多的关注。FMCW方案使用连续扫频激光光源,原理是目标反射光与参考光在探测器混合拍频,目标距离与拍频信号频率相对应。与基于飞行时间(TOF)的脉冲 LiDAR相比,使用相干探测的FMCW LiDAR可以很好的抵抗阳光直射和其他激光雷达的干扰。FMCW激光雷达分辨率与扫频范围相关,不需要使用高带宽的器件就能实现较高的分辨率,更重要的是利用多普勒效应通过单次测量可以同时得到距离和速度信息。窄线宽线性扫频光源是FMCW LiDAR的关键器件,激光器线宽会影响探测距离和测量灵敏度,而重复频率则会影响激光雷达的点云密度。
近日,苏州纳米所梁伟研究员团队开发了线宽5.06kHz、重复频率100kHz的外腔窄线宽扫频激光器,为实现较长距离的调频连续波激光雷达测距提供了一种有效光源。
线宽测量系统装置示意图如图 1 所示,插图是封装好的激光器。利用外差干涉仪测量了激光器的线宽,20dB洛伦兹线宽为71.6 kHz,对应的激光器线宽为5.06 kHz。

图1 延时外差线宽测量系统框图
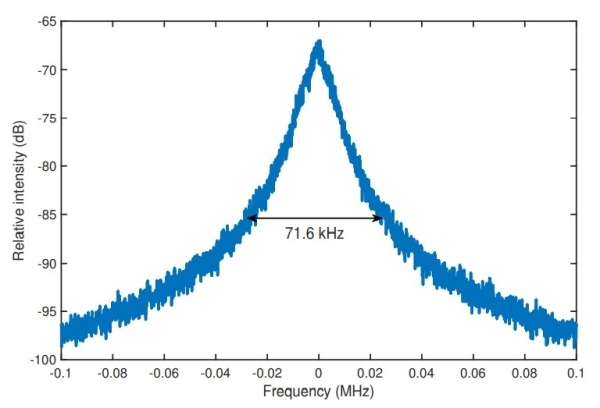
图2 使用 20公里光纤延时线测量的激光器延迟外差谱
通过搭建光纤干涉仪评估了该激光器的测距性能,当驱动电流重复频率1 kHz时,连续线性扫频范围超过1 GHz。增大扫频重复频率至100 kHz时,扫频范围降低到228.9 MHz,对应的自由空间分辨率为0.7129 m。从图3中可以看出,当光纤长度为156米(对应于自由空间110米反射)时,信噪比 SNR仍然高于35 dB 。
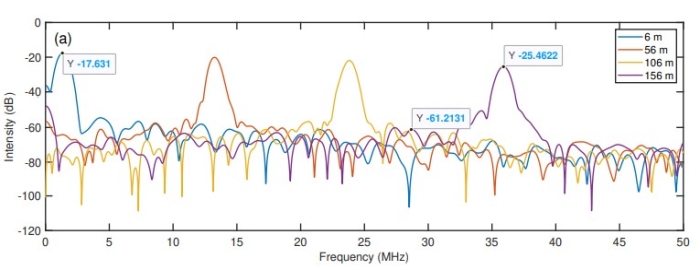
图3 调频重复率100 kHz时,不同光纤长度的测试结果
该团队利用外腔压缩激光器线宽,改变驱动电流实现频率调谐,开发了线宽5.06 kHz、重复频率100 kHz的外腔窄线宽扫频激光器,可以满足自动驾驶数百米测距的需求。最新研究成果中,通过优化调频机制,连续线性扫频范围已经达到4GHz,对应测距空间分辨率约为3.75厘米。
相关成果以“Narrow linewidth external cavity laser capable of high repetition frequency tuning for FMCW LiDAR”为题发表于国际期刊IEEE Photonics Technology Letters。中科院苏州纳米所为该论文第一完成单位,纳米器件研究部博士后吴映和博士生邓力华为论文共同第一作者,纳米器件研究部梁伟研究员为论文通讯作者。
以上工作得到了国家自然科学基金支持。
论文链接:https://ieeexplore.ieee.org/document/9872030/
(来源:中国科学院苏州纳米技术与纳米仿生研究所)

